最新多传感器融合数据集!Hilti SLAM Challenge Dataset(RAL-IROS 2022)
TIP! Right-click and select "Save link as..." to download.
| VIDEOS | |||
| MP4 | N/A | 480P | Download |
| MP4 | N/A | 360P | Download |
| AUDIO | |||
| MP4 | N/A | mp4a.40.2 | Download |
| MP4 | N/A | mp4a.40.2 | Download |
| MP4 | N/A | mp4a.40.2 | Download |
| THUMBNAILS | |||
|
JPEG | Origin Image | Download |
视频链接:https://www.youtube.com/watch?v=IwSVEHnFtic
论文链接:https://arxiv.org/abs/2109.11316v2
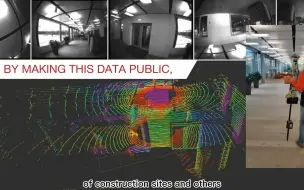
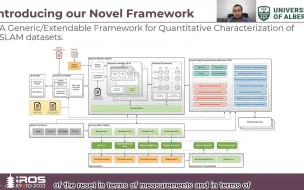
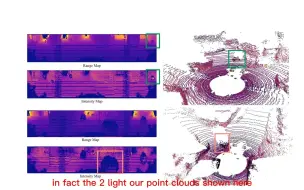
在过去的几年中,同步定位和映射(SLAM)的研究取得了显著进展。SLAM系统目前正从学术应用过渡到现实应用。然而,这一转变在准确性和鲁棒性方面提出了新的挑战。为了开发能够应对这些挑战的新SLAM系统,需要包含尖端硬件和现实场景的新数据集。我们提出了Hilti SLAM挑战数据集。我们的数据集包含办公室、实验室和施工环境的室内序列,以及施工现场和停车场的室外序列。所有这些序列的特点是无特征区域和不同的照明条件,这在现实世界中是典型的,对在受限实验室环境中开发的SLAM算法提出了巨大挑战。为每个序列提供精确的毫米级地面实况。用于记录数据的传感器平台包括许多视觉传感器、激光雷达传感器和惯性传感器,这些传感器都经过空间和时间校准。该数据集的目的是促进传感器融合研究,以开发SLAM算法,该算法可以部署在要求高精度和鲁棒性的任务中,例如在施工环境中。许多学术和工业团体在希尔蒂SLAM挑战赛的拟议数据集上测试了他们的SLAM系统。本文总结的挑战结果表明,所提出的数据集是开发新SLAM算法的重要资产,这些算法可以部署在现实世界中。
论文链接:https://arxiv.org/abs/2109.11316v2
在过去的几年中,同步定位和映射(SLAM)的研究取得了显著进展。SLAM系统目前正从学术应用过渡到现实应用。然而,这一转变在准确性和鲁棒性方面提出了新的挑战。为了开发能够应对这些挑战的新SLAM系统,需要包含尖端硬件和现实场景的新数据集。我们提出了Hilti SLAM挑战数据集。我们的数据集包含办公室、实验室和施工环境的室内序列,以及施工现场和停车场的室外序列。所有这些序列的特点是无特征区域和不同的照明条件,这在现实世界中是典型的,对在受限实验室环境中开发的SLAM算法提出了巨大挑战。为每个序列提供精确的毫米级地面实况。用于记录数据的传感器平台包括许多视觉传感器、激光雷达传感器和惯性传感器,这些传感器都经过空间和时间校准。该数据集的目的是促进传感器融合研究,以开发SLAM算法,该算法可以部署在要求高精度和鲁棒性的任务中,例如在施工环境中。许多学术和工业团体在希尔蒂SLAM挑战赛的拟议数据集上测试了他们的SLAM系统。本文总结的挑战结果表明,所提出的数据集是开发新SLAM算法的重要资产,这些算法可以部署在现实世界中。









Supported Sites













