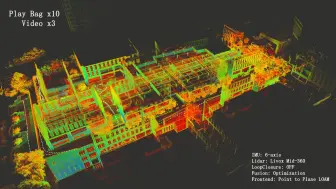
香港理工最新开源|实时LiDAR定位与Mesh建图,首个基于CPU的实时激光雷达SLAM系统!
TIP! Right-click and select "Save link as..." to download.
| VIDEOS | |||
| MP4 | N/A | 480P | Download |
| MP4 | N/A | 480P | Download |
| MP4 | N/A | 480P | Download |
| MP4 | N/A | 360P | Download |
| MP4 | N/A | 360P | Download |
| MP4 | N/A | 360P | Download |
| AUDIO | |||
| MP4 | N/A | mp4a.40.2 | Download |
| MP4 | N/A | mp4a.40.5 | Download |
| MP4 | N/A | mp4a.40.2 | Download |
| THUMBNAILS | |||

|
JPEG | Origin Image | Download |
由于内存成本较低,近年来网格成为了一种有吸引力的用于建图的稠密模型。然而,现有方法通常通过使用离线的后处理步骤来生成网格地图。这种两步法流程不允许这些方法在线上使用构建好的网格地图,并使定位和网格化相互受益。为了解决这个问题,我们提出了第一个仅基于CPU的实时激光雷达SLAM系统,可以同时构建网格地图并针对网格地图进行定位。一种新颖且直接的网格化策略与高斯过程重建相结合,实现了快速构建、配准和更新网格地图。我们在几个公共数据集上进行了实验。结果显示我们的SLAM系统可以以约40赫兹的速度运行。定位和网格化的精度也优于最先进的方法,包括TSDF地图和Poisson重建方法。
代码地址:https://github.com/RuanJY/SLAMesh
论文地址:https://arxiv.org/pdf/2303.05252.pdf
代码地址:https://github.com/RuanJY/SLAMesh
论文地址:https://arxiv.org/pdf/2303.05252.pdf









Supported Sites













