仿生青蛙
TIP! Right-click and select "Save link as..." to download.
| VIDEOS | |||
| MP4 | N/A | 480P | Download |
| MP4 | N/A | 480P | Download |
| MP4 | N/A | 480P | Download |
| MP4 | N/A | 360P | Download |
| MP4 | N/A | 360P | Download |
| MP4 | N/A | 360P | Download |
| AUDIO | |||
| MP4 | N/A | mp4a.40.2 | Download |
| MP4 | N/A | mp4a.40.5 | Download |
| MP4 | N/A | mp4a.40.2 | Download |
| THUMBNAILS | |||

|
JPEG | Origin Image | Download |
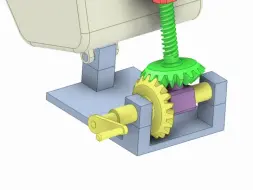
利用仿生学原理,我们设计出小巧灵活的仿生青蛙,来模拟青蛙的跳跃方式和移动方式。该仿生青蛙由机械运动结构和电子控制部分组成。机械运动结构分为前腿减震部分(长52.6mm)后退弹跳部分,动力自储存自释放部分。(伸开146mm,收缩后40mm) 。前腿减震部分是由压盖、柔性弹簧、活塞杆、活塞杆套、软胶前脚掌组成。后退弹跳部分是由主驱动轴、连杆、伸缩结构、防滑后脚掌组成。
动力自储存自释放部分是由四个一体式牵引释放钩、牵引钩连接件、两组动力弹簧、丝杠与电机组成(长46mm,宽33mm)。电子控制部分是基于51单片机开发,通过无线遥控器,控制电机的正反转。
首先由动力自储存自释放部分来储存动力,通过电机输出扭矩使得丝杠转动,丝杠的转动使得牵引钩连接键向前推动(丝杠有效长度为20mm) ,此时弹簧连接件受到拉力,弹簧也随之被拉伸,当丝杠上的牵引钩连接件被推到最大行程时,此时弹簧的拉伸量也达到最大值(弹簧有效拉伸长度20mm),随之牵引钩将会触碰到蛙身上的小凸台体,弹簧就会被瞬间释放并带动后腿弹出,完成一次跳跃。当仿生青蛙处于空中时,电机会反向转动,使得牵引钩连接回到起点,为下一次的弹跳拉伸做准备。当青蛙准备落地的一瞬间,前腿减震进行工作,为仿生青蛙的降落做缓冲。
动力自储存自释放部分是由四个一体式牵引释放钩、牵引钩连接件、两组动力弹簧、丝杠与电机组成(长46mm,宽33mm)。电子控制部分是基于51单片机开发,通过无线遥控器,控制电机的正反转。
首先由动力自储存自释放部分来储存动力,通过电机输出扭矩使得丝杠转动,丝杠的转动使得牵引钩连接键向前推动(丝杠有效长度为20mm) ,此时弹簧连接件受到拉力,弹簧也随之被拉伸,当丝杠上的牵引钩连接件被推到最大行程时,此时弹簧的拉伸量也达到最大值(弹簧有效拉伸长度20mm),随之牵引钩将会触碰到蛙身上的小凸台体,弹簧就会被瞬间释放并带动后腿弹出,完成一次跳跃。当仿生青蛙处于空中时,电机会反向转动,使得牵引钩连接回到起点,为下一次的弹跳拉伸做准备。当青蛙准备落地的一瞬间,前腿减震进行工作,为仿生青蛙的降落做缓冲。











Supported Sites













