BLOS-BEV:BEV感知超200米!nuScenes和Argoverse双SOTA!
TIP! Right-click and select "Save link as..." to download.
| VIDEOS | |||
| MP4 | N/A | 480P | Download |
| MP4 | N/A | 480P | Download |
| MP4 | N/A | 360P | Download |
| MP4 | N/A | 360P | Download |
| AUDIO | |||
| MP4 | N/A | mp4a.40.2 | Download |
| MP4 | N/A | mp4a.40.5 | Download |
| MP4 | N/A | mp4a.40.2 | Download |
| THUMBNAILS | |||

|
JPEG | Origin Image | Download |
文章地址:https://arxiv.org/pdf/2407.08526
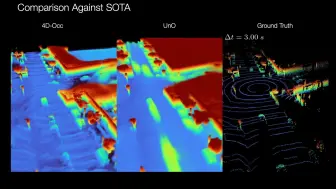
鸟瞰图(BEV)表示在自动驾驶任务的感知功能中至关重要。平衡BEV表示的准确性、效率和范围是一个困难的问题。现有的工作限制在50米内的感知范围内。扩展BEV表示范围可以通过提供更全面的信息和反应时间,大大有利于下游任务,如拓扑推理、场景理解和规划。标准定义(SD)导航地图可以提供道路结构拓扑的轻量级表示,其特点是易于获取和维护成本低。一个直观的想法是结合车载摄像头的近距离视觉信息与来自SD地图的超视距(BLOS)环境先验,以实现扩展的感知能力。在本文中,提出了BLOS-BEV,一种结合SD地图用于准确超视距感知的新型BEV分割模型,感知范围可达200米。我们的方法适用于常见的BEV架构,并通过结合SD地图的派生信息,取得优异的结果。我们探索了各种特征融合方案,以有效整合视觉BEV表示和SD地图的语义特征,旨在最佳利用两者的互补信息。大量实验表明,我们的方法在nuScenes和Argoverse基准上的BEV分割中实现了最先进的性能。通过多模态输入,BEV分割在50米以内的近距离场景中显著增强,同时在50-200米的长距离场景中表现出色,mIoU超过其他方法20%以上。
BLOS-BEV: Navigation Map Enhanced Lane Segmentation Network,
Beyond Line of Sight
鸟瞰图(BEV)表示在自动驾驶任务的感知功能中至关重要。平衡BEV表示的准确性、效率和范围是一个困难的问题。现有的工作限制在50米内的感知范围内。扩展BEV表示范围可以通过提供更全面的信息和反应时间,大大有利于下游任务,如拓扑推理、场景理解和规划。标准定义(SD)导航地图可以提供道路结构拓扑的轻量级表示,其特点是易于获取和维护成本低。一个直观的想法是结合车载摄像头的近距离视觉信息与来自SD地图的超视距(BLOS)环境先验,以实现扩展的感知能力。在本文中,提出了BLOS-BEV,一种结合SD地图用于准确超视距感知的新型BEV分割模型,感知范围可达200米。我们的方法适用于常见的BEV架构,并通过结合SD地图的派生信息,取得优异的结果。我们探索了各种特征融合方案,以有效整合视觉BEV表示和SD地图的语义特征,旨在最佳利用两者的互补信息。大量实验表明,我们的方法在nuScenes和Argoverse基准上的BEV分割中实现了最先进的性能。通过多模态输入,BEV分割在50米以内的近距离场景中显著增强,同时在50-200米的长距离场景中表现出色,mIoU超过其他方法20%以上。
BLOS-BEV: Navigation Map Enhanced Lane Segmentation Network,
Beyond Line of Sight








![Download Video: [分享]| 为什么Arduino没有广泛应用于工业?](https://i0.hdslb.com/bfs/archive/f0c5b74ea42efc11f503575b9b3c8b76d719fc2d.jpg@336w_190h_!web-video-rcmd-cover.webp)
Supported Sites













