【毕设-大作业04】-基于深度学习的前方车辆测距和碰撞预警系统
提示! 右键单击并选择“Save link as...”进行下载。
| VIDEOS | |||
| MP4 | N/A | 480P | 下载 |
| MP4 | N/A | 360P | 下载 |
| THUMBNAILS | |||

|
JPEG | Origin Image | 下载 |
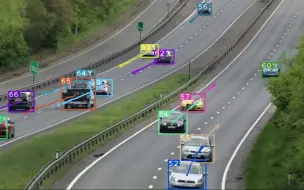
本项目通过yolov10/yolov9/yolov8/yolov7/yolov5和deepsort实现了一个自动驾驶领域的追尾前车碰撞预警系统,可作为同学的毕设、大作业等。
分别实现了自行车、汽车、摩托车、公交车、卡车的实时检测、跟车距离测量、车辆间的相对速度测量、基于人脑反应后车辆的刹停时间time_person的碰撞预警功能。
1、若计算出来的时间t小于time_person的1/2,则判定为高风险,并将车辆目标绘制为红色框进行预警。
2、若时间t介于time_person和time_person的1/2之间,则判定为低风险,并将车辆目标绘制为黄色框进行预警。
3、若时间t大于time_person,则并将车辆目标绘制为绿色框,判定为无风险。
项目原理讲解:
https://blog.csdn.net/weixin_44944382/article/details/128518452?spm=1001.2014.3001.5501
有偿获取源码、测试视频、训练好的权重、说明文档。
QQ:3582584734
分别实现了自行车、汽车、摩托车、公交车、卡车的实时检测、跟车距离测量、车辆间的相对速度测量、基于人脑反应后车辆的刹停时间time_person的碰撞预警功能。
1、若计算出来的时间t小于time_person的1/2,则判定为高风险,并将车辆目标绘制为红色框进行预警。
2、若时间t介于time_person和time_person的1/2之间,则判定为低风险,并将车辆目标绘制为黄色框进行预警。
3、若时间t大于time_person,则并将车辆目标绘制为绿色框,判定为无风险。
项目原理讲解:
https://blog.csdn.net/weixin_44944382/article/details/128518452?spm=1001.2014.3001.5501
有偿获取源码、测试视频、训练好的权重、说明文档。
QQ:3582584734











支持的站点













