水下航行器的设计、建模和仿真【基于Matlab】
MẸO! Click chuột phải và chọn "Save link as..." để tải xuống.
| VIDEOS | |||
| MP4 | N/A | 480P | Tải xuống |
| MP4 | N/A | 480P | Tải xuống |
| MP4 | N/A | 360P | Tải xuống |
| MP4 | N/A | 360P | Tải xuống |
| AUDIO | |||
| MP4 | N/A | mp4a.40.2 | Tải xuống |
| MP4 | N/A | mp4a.40.5 | Tải xuống |
| MP4 | N/A | mp4a.40.2 | Tải xuống |
| THUMBNAILS | |||

|
JPEG | Origin Image | Tải xuống |
Matlab
概述
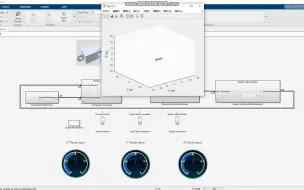
自治系统本质上是跨学科的,因此工程团队面临的主要挑战之一是需要规划、沟通和集成其设计的不同方面。在本次演讲中,我们将通过展示 MATLAB 和 Simulink 如何帮助为自主水下航行器 (AUV) 的开发提供统一的环境来解决这个问题和其他常见挑战。MathWorks 工程师将通过 AUV 示例展示我们的工具如何用于贸易研究、车辆动力学建模、地图、路径规划、导航、控制等。
突出
在本演示中,我们将介绍:
跨学科自主水下航行器设计工作流程概述
从需求到运行权衡研究和评估故障定义系统架构
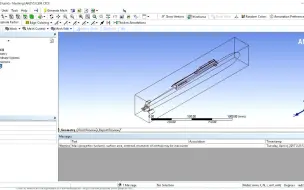
复杂水下动力学的建模和仿真,以预测车辆性能
如何利用高级 MathWorks 工具箱加速自主算法开发
在开始海上冒险测试之前,在模拟水下场景中测试自主导航算法
关于演示者
吴友 – 机器人行业经理,MathWorks
Mike Rudolph – MathWorks 航空航天和国防工业经理
Carlos Osorio – 航空航天和国防首席应用工程师,MathWorks
Julia Antoniou – MathWorks 航空航天和国防应用工程师
Ronal George – MathWorks 自治系统产品工程师
概述
自治系统本质上是跨学科的,因此工程团队面临的主要挑战之一是需要规划、沟通和集成其设计的不同方面。在本次演讲中,我们将通过展示 MATLAB 和 Simulink 如何帮助为自主水下航行器 (AUV) 的开发提供统一的环境来解决这个问题和其他常见挑战。MathWorks 工程师将通过 AUV 示例展示我们的工具如何用于贸易研究、车辆动力学建模、地图、路径规划、导航、控制等。
突出
在本演示中,我们将介绍:
跨学科自主水下航行器设计工作流程概述
从需求到运行权衡研究和评估故障定义系统架构
复杂水下动力学的建模和仿真,以预测车辆性能
如何利用高级 MathWorks 工具箱加速自主算法开发
在开始海上冒险测试之前,在模拟水下场景中测试自主导航算法
关于演示者
吴友 – 机器人行业经理,MathWorks
Mike Rudolph – MathWorks 航空航天和国防工业经理
Carlos Osorio – 航空航天和国防首席应用工程师,MathWorks
Julia Antoniou – MathWorks 航空航天和国防应用工程师
Ronal George – MathWorks 自治系统产品工程师









Trang được hỗ trợ













